Tom,
Sorry if it seems I am flooding the board here. I have been working with my SnapAmp all day. Trying to get a servo to run for the first time.
Here is the report that I get when I run the AutoPhaseFind.c program. I am wanting to double check what to do with these values.
REPORT
------
0 Position = -10050 PhaseAngle = 3.753000
1 Position = -20050 PhaseAngle = 7.753000
2 Position = -10051 PhaseAngle = 3.552000
3 Position = -51 PhaseAngle = -0.448000
Counts per rev = -10000
Counts per cycle = -2500
Counts per cycle (rounded)= -2500
invDistPerCycle (rounded)= -0.000400000000
Commutation offset = -1006
Input Gain Specified = 1.000
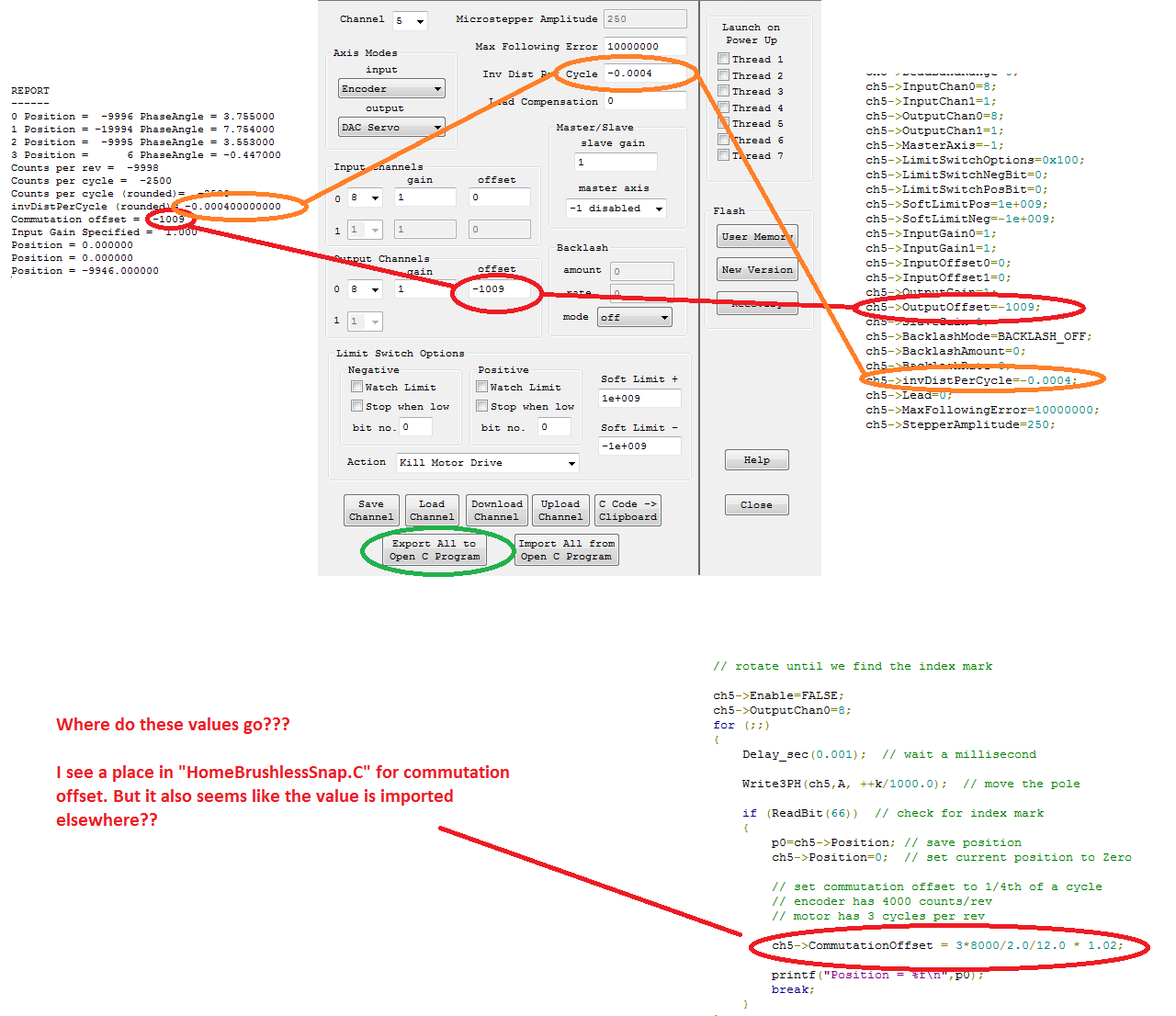
I believe that I will use some of these parameters in this C program, but dont understand what goes where.
{
p0=ch4->Position; // save position
ch4->Position=0; // set current position to Zero
// set commutation offset to 1/4th of a cycle
// encoder has 4000 counts/rev
// motor has 3 cycles per rev
ch4->CommutationOffset = 3*8000/2.0/12.0 * 1.02;
printf("Position = %f\n",p0);
break;
Do I also paste -0.0004 into the configure flash screen?
Thanks,
Scott
{kind=link}